
직원의 안전을 위해 제조 환경에서는 엄격한 규정 및 특별 안전 조치가 필요합니다. 일반적으로 사람과 기계를 공간적으로 분리하는 울타리 같은 장벽은 일반적이며 통합이 비교적 쉬운 해결책입니다. 그러나 기계식 시스템을 설치할 수 없거나 작업 공정에 영향을 받는 경우 라이트 그리드 또는 라이트 커튼과 같은 비접촉식 안전성 개념을 사용할 수 있습니다. 라이트 커튼은 밀착된 보호 필드를 형성하므로 위험 영역에 접근하는 것을 보호합니다.
헥사포드가 구동 중일 때 언제 안전 장치를 사용하는 것이 유용합니까?

헥사포드는 6축 병렬 키네마틱 포지셔닝 시스템으로, 안전하게 산업용 셋업에 통합되는 작업 공간이 제한되어 있습니다. 다이내믹 모션의 헥사포드는 빠른 속도와 가속도로 인해 상황이 다르며, 이는 가까운 작업 공간에서 일하는 작업자에게 위험 요소가 됩니다. 위험에 빠졌을 때 신체가 반응하는 속도는 한계가 있기 때문입니다. 충돌이 발생할 때 높은 관성으로 인해 신체에 많은 충격이 가해질 수 있으므로 안전 시스템은 작업자를 보호하고 부상 위험을 최소화합니다.
PI 헥사포드 컨트롤러는 버전에 따라 모션 정지 입력을 제공합니다. 이 입력은 외부 하드웨어(예; 푸시 버튼 또는 스위치)를 연결하는 데 사용되며, 헥사포드 드라이브의 전원 공급을 활성화/비활성화 합니다. 그러나 모션 정지 소켓은 적용 가능한 표준(예; IEC 60204-1, IEC 61508, IEC 62061)에 따라 직접적인 안전 기능을 제공하지 않습니다.
이를 위해 EN/IEC 61508 및 EN/IEC 61496-1/-2에 승인된 PILZ 라이트 커튼을 헥사포드의 제어에 통합할 수 있습니다.
광선 중 하나가 중단되면 라이트 배리어는 2개의 OSSD(Output Switching Signal Device)를 통해 정보를 출력합니다. 표준 상태에서는 출력이 24V이며, 자체 모니터링을 위해 짧고 비동기적으로 0V로 떨어집니다. 출력 신호를 해석할 수 있으려면 고장 발생 시 기계 작동을 끄거나 멈출 수 있는 적합하고 안정된 안전 릴레이가 필요합니다.
라이트 커튼 설계 – 안전 레벨의 정의, 최소 거리, 셋업
EN ISO 13849-1에 따른 위험 평가는 위험 상황 및 안전 시스템에 대한 요구 사항을 평가하는 데 사용할 수 있습니다. 안전 장치와 위험 영역 사이의 최소 거리는 EN ISO 13855 표준으로 계산됩니다. 이 치수는 라이트 배리어가 모니터링 해야 하는 최대 범위를 정의할 때 중요합니다. 접근 속도는 신체의 보호 수준에 따라 달라집니다.
헥사포드의 안전 장치로는 해상도 30mm의 근접 메시 라이트 커튼을 사용하였으며, 100mm/s의 헥사포드 속도에서 필요한 정지 거리는 3mm인 것으로 가정했습니다.
해상도가 40mm 미만인 라이트 커튼에 유효한 다음 공식을 사용하면 316mm의 안전 거리를 계산할 수 있습니다.

S = safety distance, v = approach velocity, t1 and t2 = triggering time of the electronics and braking time of the machine, d = resolution of the light barrier
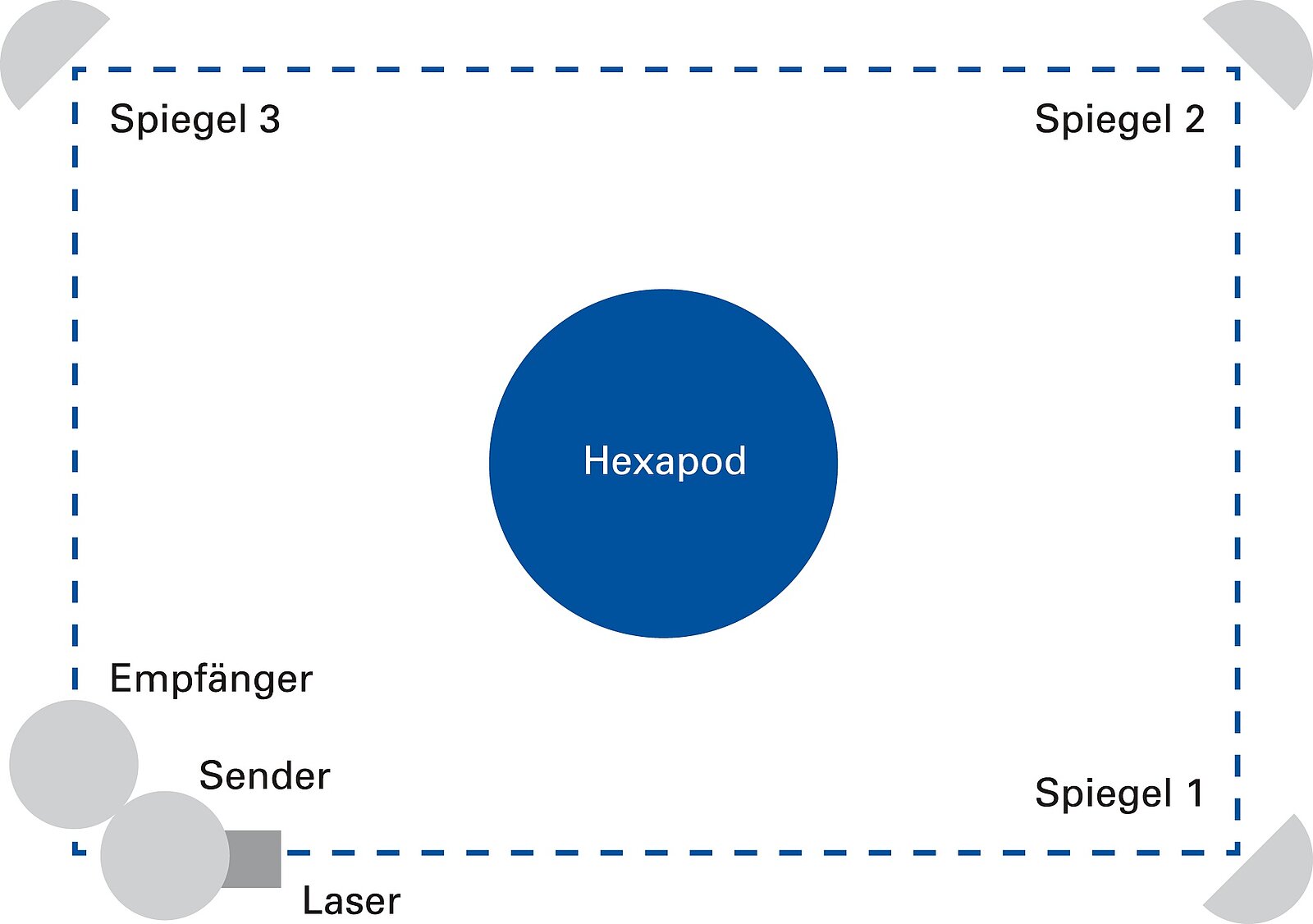
기본 파라미터와 가정에 기초하여 아래 그림과 같이 기계적 셋업이 구현되었습니다. 이러한 안전 기능의 구현은 예시처럼 Python 프로그래밍 언어로 작성되었습니다. 하지만 다른 소프트웨어 솔루션을 선택하거나 PLC를 사용하여 EtherCAT®을 통해헥사포드를 연결할 수 있습니다.


White paper
Industrial Safety Device for Hexapods
How to Connect a Safety Light Barrier to a Hexapod System


